Autonomous Pathbot
This project created a two-wheeled robot capable of following pre-programmed path instructions using odometry localization and custom control software.
Component Sourcing
- MCU: ESP32-WROOM for wireless capabilities and compute.
- Motor Driver: TB6612FNG (up to ~1.2 A continuous).
- Motors: Geared motors ~500 RPM with magnetic quadrature encoders for precise tracking.
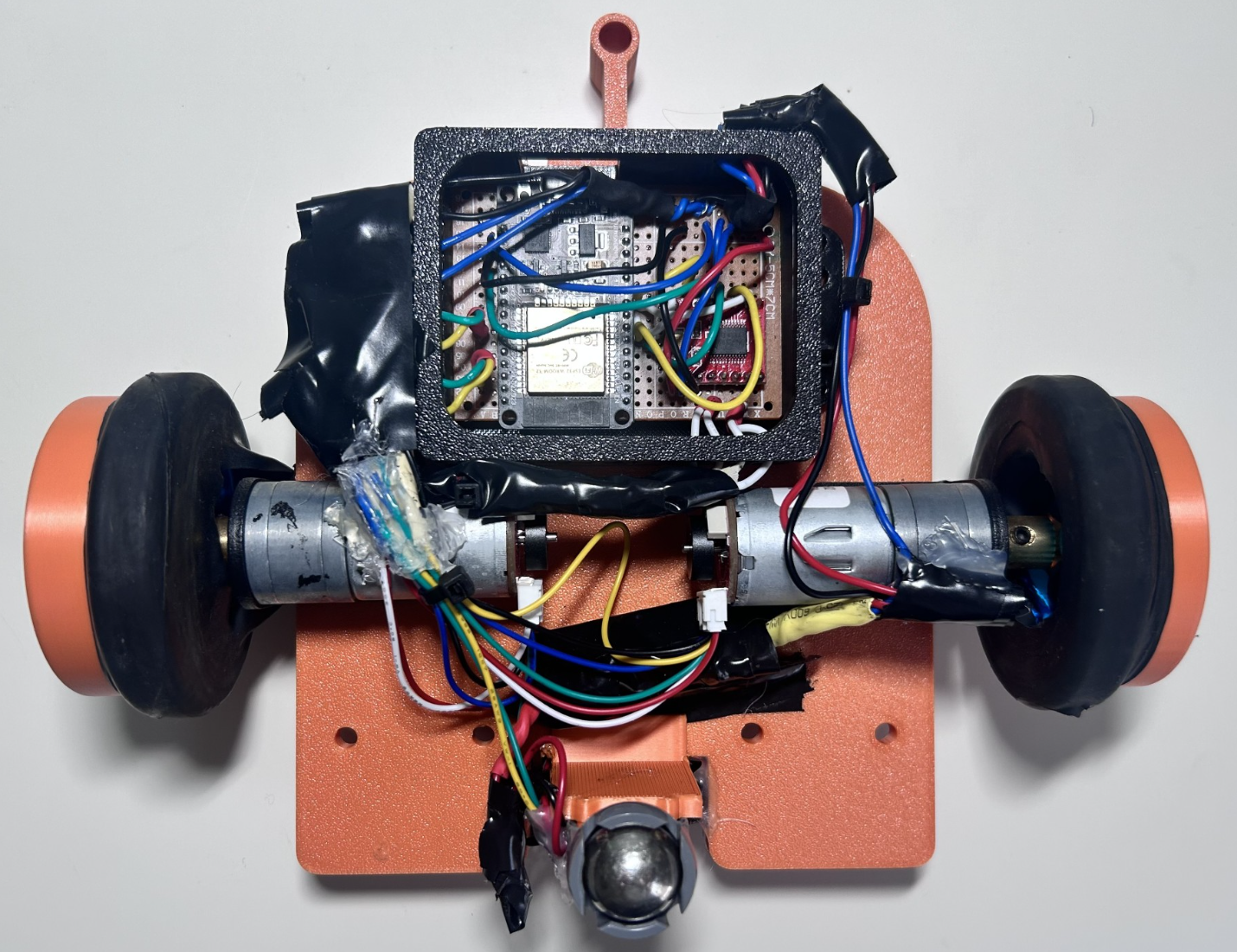
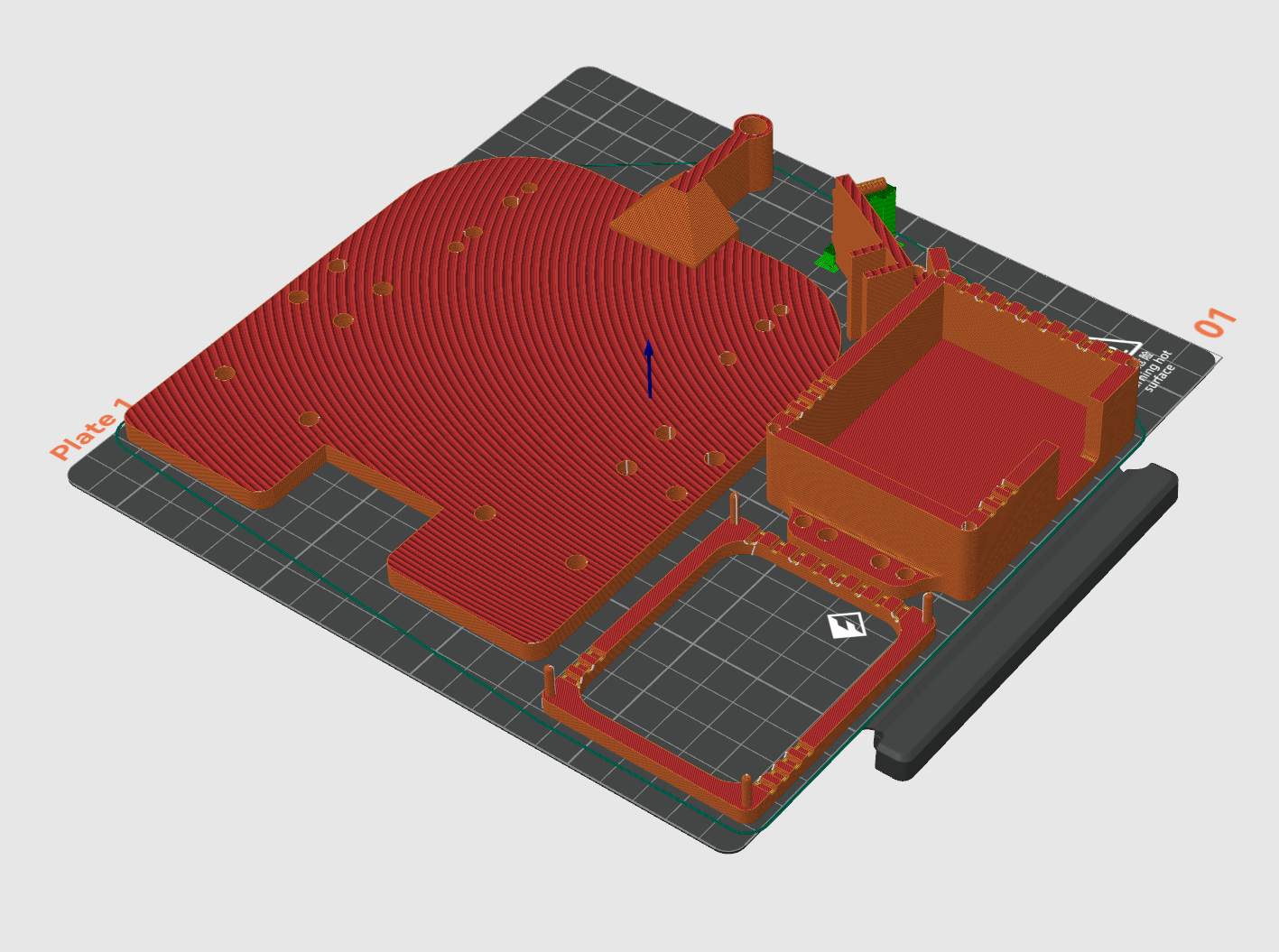
Chassis Design & Fabrication
Custom enclosure and drivetrain chassis were designed in Fusion 360. Wheels and parts were 3D printed in PLA. Wheel diameter inconsistencies were corrected to improve localization accuracy.
Localization Programming (C++)
- Implemented odometry-based localization using encoder inputs.
- Custom PID controllers generate motor commands to reach target poses.
- A command scheduler manages a stack of path commands and updates targets according to positional conditions.
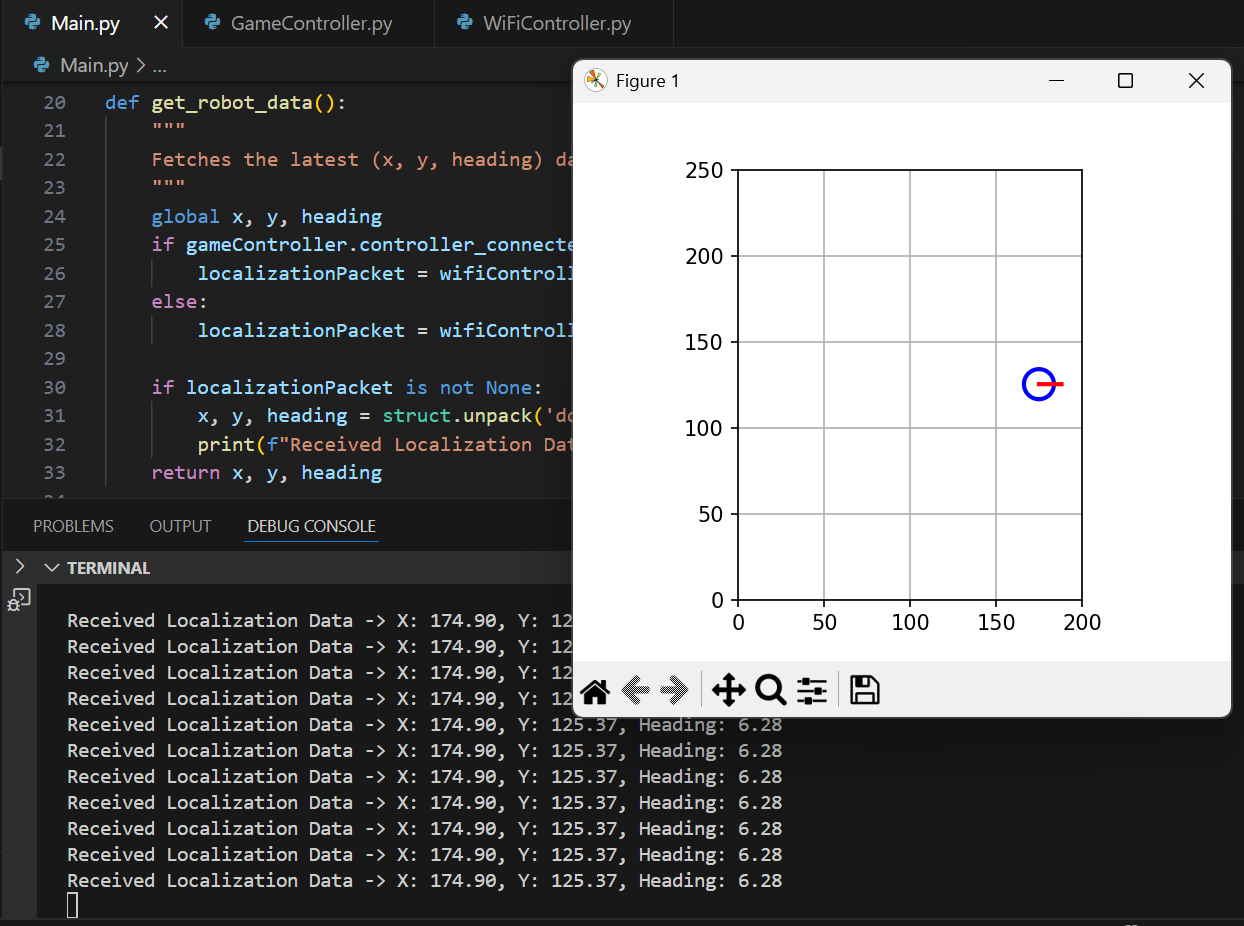
- Wireless telemetry: robot transmits localization data via TCP and accepts manual control via UDP. A Python PC script displays real-time data.
Tuning & Optimization
- Localization tuning: calibrate wheel sizing and encoder counts.
- PID tuning: balance speed vs. overshoot to minimize drift.
- Results: Accurate localization within a few centimeters under manual control. Motion profiling absence produced drift on longer trajectories (wheel slip during rotation).